產(chǎn)品簡介:
組成:
本試驗(yàn)系統(tǒng)由試驗(yàn)臺(tái)架(剛性加載裝置、伺服加載控制及數(shù)據(jù)采集系統(tǒng)、豎向均布載荷(電動(dòng)伺服系統(tǒng))加載機(jī)構(gòu)、試驗(yàn)軟件及計(jì)算機(jī)系統(tǒng)組成。用于礦山、地質(zhì)、水利及建筑等領(lǐng)域。用擴(kuò)大或縮小的模型研究對(duì)應(yīng)原型的力學(xué)運(yùn)動(dòng)及其他相關(guān)特性。測量地壓欠缺補(bǔ)償情況下的時(shí)間、位移、載荷。計(jì)算彈性模量、壓力、強(qiáng)度等參數(shù)。
剛性加載裝置,由一個(gè)剛性加載架、一個(gè)相似實(shí)驗(yàn)材料充填槽和8組電子伺服油缸組成,鋼質(zhì)結(jié)構(gòu)。裝料腔1500*1500*200mm,特種型鋼材質(zhì),在20t壓力下每米變形小于0.001mm。加載架由內(nèi)外框架的上橫梁、底梁及兩側(cè)的豎梁組成一個(gè)封閉的受力框架。垂直加載架上橫梁上配置8個(gè)垂向電子伺服缸。單個(gè)電子伺服缸工作時(shí)設(shè)計(jì)荷載25 kN。每個(gè)電子伺服缸均有位移測量傳感器對(duì)電子伺服缸位移實(shí)時(shí)監(jiān)測位移,測量范圍1%-100%FS,位移分辨率0.001mm。
豎向均布載荷(電動(dòng)伺服系統(tǒng))加載機(jī)構(gòu):垂直加載系統(tǒng)由外側(cè)上橫梁、垂直電子伺服缸組及底梁組成。梁的安全系數(shù)大,具有足夠的抗彎性能。垂向加載電子伺服缸均為雙向伺服缸,均勻分布工作空間內(nèi),活塞桿與壓板間采用剛性聯(lián)結(jié),壓板間留10 mm間隙,以保證不形成梁式傳遞,同時(shí)均勻向試驗(yàn)體傳遞壓力。
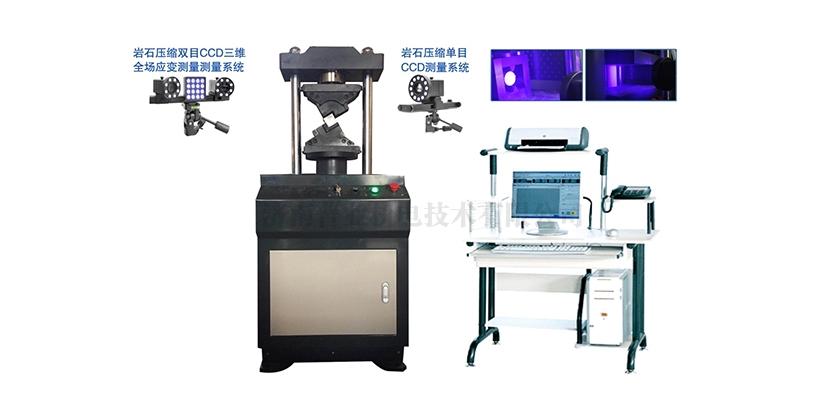
產(chǎn)品圖片:
驗(yàn)系統(tǒng)(土體相似模擬)")
控制系統(tǒng)功能簡介
可為200KN的電子伺服系統(tǒng)配套,控制也可配單通道至八通道閉環(huán)控制系統(tǒng)。伺服控制器可以選擇接不同的控制方式:如伺服電機(jī)、伺服閥、比例閥等,,滿 足不同作動(dòng)器需要。控制系統(tǒng)見下圖
驗(yàn)系統(tǒng)(土體相似模擬)")
該系統(tǒng)采用琴健式控制臺(tái):臺(tái)灣研華工業(yè)控制計(jì)算機(jī)和顯示器及伺服控制單元全部裝入控制臺(tái)內(nèi)。
伺服控制單元在控制臺(tái)內(nèi)部,是整個(gè)控制系統(tǒng)的核心。主要由載荷、位移傳感器驅(qū)動(dòng)及放大部分,八通道伺服控制系統(tǒng)控制部分,信號(hào)發(fā)生部分(動(dòng)態(tài)選配)等三大部分組成。主要完成對(duì)電子伺服缸的控制,將來自信號(hào)發(fā)生部分(給定信號(hào))的命令與來自傳感器驅(qū)動(dòng)及放大部分的信號(hào)(反饋信號(hào))進(jìn)行比較、調(diào)節(jié)和處理后對(duì)電子伺服缸進(jìn)行驅(qū)動(dòng),從而實(shí)現(xiàn)閉環(huán)控制。
工控機(jī)內(nèi)有我公司自產(chǎn)工業(yè)控制D/A、A/D板,完成信號(hào)的采集、處理等工作。
本機(jī)所有操作通過控制臺(tái)按鍵和計(jì)算機(jī)鼠標(biāo)進(jìn)行,非常方便。軟件功能強(qiáng)大,界面友好,試驗(yàn)報(bào)告按要求打印輸出。
軟件優(yōu)勢(shì)
管理級(jí)PC機(jī)軟件界面(PY-TEST)
該軟件主要完成系統(tǒng)試驗(yàn)的定義、管理、監(jiān)控和試驗(yàn)數(shù)據(jù)的處理等工作,提供易操作的人機(jī)界面而不參與實(shí)時(shí)控制,故采用了中文Win7操作平臺(tái)。
驗(yàn)系統(tǒng)(土體相似模擬)")
波形顯示界面(系統(tǒng)可以實(shí)現(xiàn)各種波形圖例),如下圖:
驗(yàn)系統(tǒng)(土體相似模擬)")
技術(shù)參數(shù):
1、 控制:自動(dòng)控制;
2、 垂直向最大單點(diǎn)負(fù)荷值:25kN;
3、 模型尺寸:裝料腔1500*1500*200mm;
4、 加載點(diǎn):8;
5、 力控速率調(diào)節(jié)范圍:5N—1Kn/s
6、 位移等速率控制范圍0.05~50mm/min
7、 單點(diǎn)力值控制精度:示值±0.5%
8、 單點(diǎn)載荷加載范圍:1—100%FS
9、 同向協(xié)同加載時(shí)間:≤50m/s
10、保載時(shí)間:≮30天
11、保載過程載荷控制精度:示值±1%
12、電動(dòng)伺服缸行程:200mm
13、位移測量精度:±1%
14、 同向同步、反向同步等協(xié)調(diào)加載控制;
15、 控制方式:可選擇負(fù)荷、位移閉環(huán)控制方式、且可無沖擊平滑切換;
16、 軟件系統(tǒng):中文win7工作平臺(tái),鼠標(biāo)操作,在線提示,操作簡便;
17、 自動(dòng)調(diào)零:試驗(yàn)開始時(shí),負(fù)荷、位移自動(dòng)復(fù)零;
18、 自動(dòng)存盤:試驗(yàn)條件參數(shù)和測試數(shù)據(jù)自動(dòng)存盤,方便用戶操作;
19、 顯示方式:實(shí)現(xiàn)負(fù)荷、位移次數(shù)及其上下峰值、多種試驗(yàn)曲線全部工程量的顯示;
20、 結(jié)果再現(xiàn):試驗(yàn)結(jié)果可任意存取,對(duì)數(shù)據(jù)、曲線進(jìn)行再分析;
21、 自動(dòng)加載:各個(gè)試驗(yàn)參數(shù)設(shè)置完后,系統(tǒng)將實(shí)現(xiàn)自動(dòng)加載;
22、 緊急停機(jī):設(shè)有急停開關(guān),用于緊急狀態(tài)時(shí)切斷系統(tǒng)電源;
23、 試驗(yàn)報(bào)告:按用戶要求可設(shè)計(jì)試驗(yàn)報(bào)告格式;
24、 限位保護(hù):具有軟件和機(jī)械限位保護(hù)功能;
25、 過載保護(hù):當(dāng)負(fù)荷超過設(shè)定值時(shí),自動(dòng)停機(jī);

機(jī)")







機(jī)")
機(jī)")
